



 产品分类
产品分类

2025-11
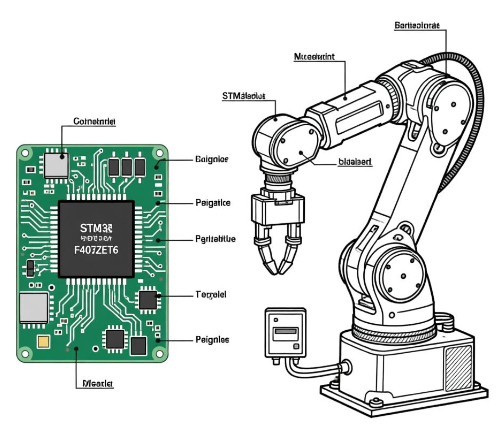
基于STM32F407ZET6的侦测六足机器人设计方案
基于STM32F407ZET6的侦测六足机器人设计方案一、系统概述与需求分析侦测六足机器人需具备复杂地形适应能力、环境感知与自主决策能力,适用于灾害救援、野外侦察等场景。其核心需求包括:运动控制:六足协同运动实现稳定行走、转向及避障。环境感知:集成多传感器(超声波、红外、摄像头)实现障碍物检测与地形识别。实时通信:通过无线模块(如NRF2......


2025-11
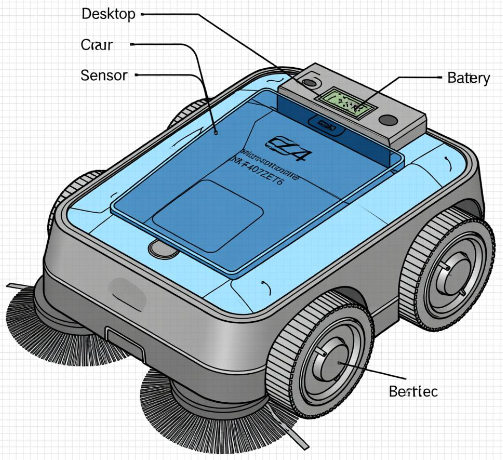
基于STM32F407ZET6的移动式桌面自动清洁机器人设计方案
基于STM32F407ZET6的移动式桌面自动清洁机器人设计方案一、项目背景与需求分析在餐饮行业及公共场所中,桌面清洁的效率与质量直接影响用户体验和运营成本。传统人工清洁存在劳动强度大、效率低、易打碎餐具等问题,尤其在用餐高峰期,人工清洁难以满足快速响应需求。针对这一痛点,设计一款基于STM32F407ZET6的移动式桌面自动清洁机器人,......
2025-11
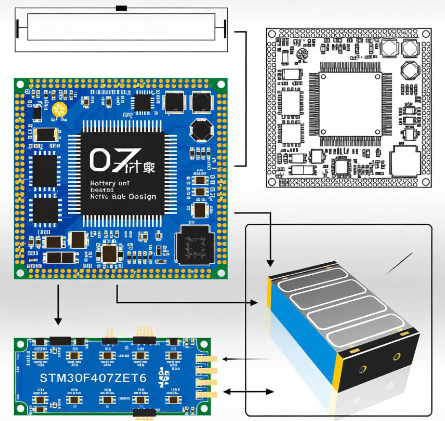
基于STM32F407ZET6的锂电池组主动均衡控制系统设计方案
基于STM32F407ZET6的锂电池组主动均衡控制系统设计方案一、系统设计背景与目标锂电池组在串联使用时,因单体电池容量、内阻及自放电率的差异,长期充放电循环后易出现“木桶效应”,即整体性能受限于容量最低的单体电池。传统被动均衡通过电阻发热消耗高电压单体能量,存在效率低、发热量大、均衡速度慢等问题,难以满足高精度、高效率的均衡需求。主动......
2025-11
基于STM32F407ZET6的电子支付系统设计方案
基于STM32F407ZET6的电子支付系统设计方案一、系统概述与核心需求分析电子支付系统作为现代金融交易的核心载体,需满足高安全性、实时性、低功耗及多接口兼容性等关键需求。以STM32F407ZET6微控制器为核心的设计方案,依托其168MHz主频、1MB Flash存储、192KB SRAM及丰富的外设资源,可高效实现支付指令处理、数......
2025-11
基于STM32F407ZET6的拖曳式诱饵释放回收控制器设计方案
基于STM32F407ZET6的拖曳式诱饵释放回收控制器设计方案在复杂电磁环境下的军事作战与航空防御场景中,拖曳式诱饵系统作为对抗敌方雷达制导武器的重要手段,其释放与回收的精准性直接关系到任务成败。传统控制器因抗干扰能力弱、响应延迟高、功能扩展性差等问题,难以满足现代战场对实时性、可靠性与智能化的严苛要求。针对此痛点,本方案提出以STM3......
2025-11
基于STM32F407ZET6的光电太阳跟踪系统设计方案
基于STM32F407ZET6的光电太阳跟踪系统设计方案引言随着全球能源需求的增长和可再生能源技术的快速发展,太阳能作为一种清洁、可再生的能源,在发电、供热等领域的应用日益广泛。然而,太阳能的利用效率受太阳位置变化的影响显著,传统固定式太阳能板无法实时调整角度,导致能量吸收效率低下。为解决这一问题,太阳跟踪系统应运而生,通过实时追踪太阳位......
2025-11
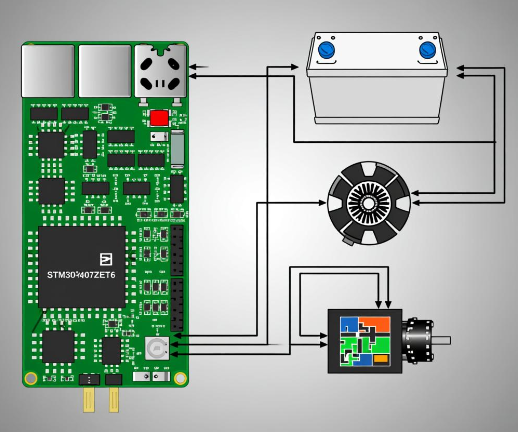
基于STM32F407ZET6的矿用蓄电池机车调速系统设计方案
基于STM32F407ZET6的矿用蓄电池机车调速系统设计方案一、系统设计背景与目标煤矿开采过程中,矿用蓄电池机车作为核心运输设备,其调速系统的性能直接影响运输效率与安全性。传统串激直流电机调速系统存在能耗高、调速精度低、故障率高等问题,难以满足现代煤矿对节能、高效、稳定的需求。基于STM32F407ZET6的矢量控制调速系统,通过无刷直......
2025-11

基于STM32F407ZET6的无人艇测控装置设计方案
基于STM32F407ZET6的无人艇测控装置设计方案引言无人艇作为一种无人化水上平台,在军事和民用领域均具有重要应用价值。军事上,其可执行查打一体任务,弥补非对称作战体系的不足;民用领域则广泛应用于海洋监测、灾害预警、环境巡逻等复杂危险场景。测控装置作为无人艇的核心系统,负责信息采集、设备控制、通信导航及数据处理,其性能直接影响无人艇的......
2025-11
基于STM32F407ZET6的多点触控电子墨水屏显示系统设计方案
基于STM32F407ZET6的多点触控电子墨水屏显示系统设计方案一、系统设计背景与目标电子墨水屏(E-Ink)以其低功耗、类纸质显示效果和广视角等特性,在电子书阅读器、电子标签、智能穿戴设备等领域广泛应用。然而,传统电子墨水屏存在刷新率低、残影明显、交互方式单一等问题,限制了其在动态显示和复杂交互场景中的应用。为突破这些瓶颈,本方案提出......
2025-11
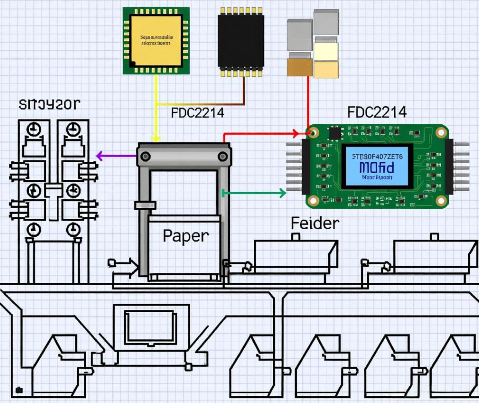
基于STM32F407ZET6和FDC2214的纸张计数系统设计方案
基于STM32F407ZET6和FDC2214的纸张计数系统设计方案在现代办公自动化、图书馆管理及工业生产领域,纸张数量的精确统计是提升效率与质量的关键环节。传统人工计数方式不仅效率低下,且易受人为因素干扰导致误差;而现有电子计数设备多存在精度不足、抗干扰能力弱等问题。针对上述痛点,本方案提出基于STM32F407ZET6微控制器与FDC......
2025-11
基于STM32F407ZET6的码垛机器人控制系统设计方案
基于STM32F407ZET6的码垛机器人控制系统设计方案一、项目背景与需求分析码垛机器人作为工业自动化领域的核心设备,广泛应用于物流、仓储、生产线等场景,其核心功能是通过机械臂实现货物的精准抓取、搬运和堆叠。传统码垛机器人多采用PLC或工业计算机作为控制器,存在成本高、灵活性差、扩展性不足等问题。随着嵌入式技术的发展,基于高性能微控制器......
2025-11
基于STM32F407ZET6的光电式太阳跟踪系统设计方案
基于STM32F407ZET6的光电式太阳跟踪系统设计方案一、系统设计背景与目标随着全球能源需求的增长和传统能源的枯竭,太阳能作为一种清洁、可再生的能源,其开发利用效率成为关键问题。光电式太阳跟踪系统通过实时调整太阳能板的角度,使其始终垂直于太阳光线,可显著提升光伏发电效率。传统固定式太阳能板的发电效率受太阳角度变化影响较大,而双轴跟踪系......
2025-11

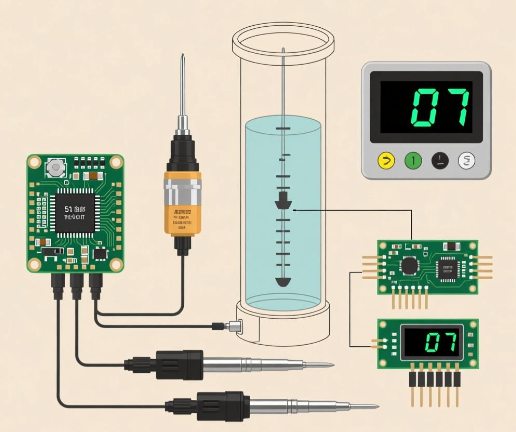
基于STM32F407ZET6的木球挥杆速度检测系统设计方案
基于STM32F407ZET6的木球挥杆速度检测系统设计方案一、系统设计背景与目标木球运动作为一项兼具竞技性与趣味性的体育项目,其挥杆动作的精准度与速度直接影响击球效果。传统训练中,运动员难以实时获取挥杆速度数据,导致技术改进缺乏量化依据。本方案旨在设计一款基于STM32F407ZET6微控制器的木球挥杆速度检测系统,通过高精度传感器采集......
2025-11
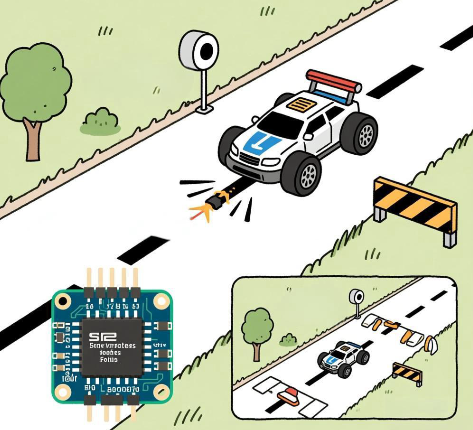
基于STM32F407ZET6的智能小车循迹避障设计方案
基于STM32F407ZET6的智能小车循迹避障设计方案一、项目背景与需求分析随着人工智能与物联网技术的快速发展,智能移动机器人已成为工业自动化、物流运输、家庭服务等领域的重要工具。智能小车作为移动机器人的基础载体,其核心功能包括自主循迹、避障、路径规划等。本方案以STM32F407ZET6微控制器为核心,设计一款具备高精度循迹与实时避障......
2025-11
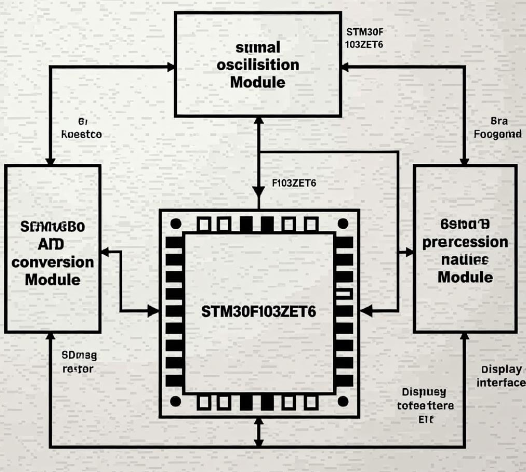
基于STM32F103ZET6的简易示波器设计方案
基于STM32F103ZET6的简易示波器设计方案一、项目背景与需求分析示波器作为电子工程师必备的测试工具,广泛应用于信号分析、故障诊断和电路调试。传统示波器存在体积大、成本高、功能冗余等问题,难以满足教学实验、电子爱好者等场景的需求。基于STM32F103ZET6的简易示波器通过集成高性能微控制器、高分辨率显示屏和灵活的信号处理模块,实......
2025-11
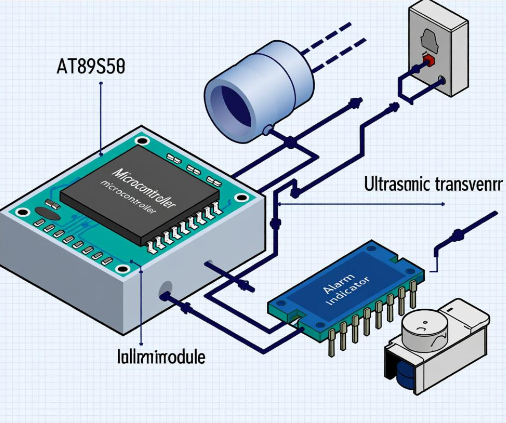
基于AT89S51单片机的超声波传感器汽车防撞报警系统设计方案
基于AT89S51单片机的超声波传感器汽车防撞报警系统设计方案一、系统设计背景与意义随着汽车保有量的快速增长,道路交通安全问题日益凸显。汽车碰撞事故中,因驾驶员未及时察觉前方障碍物或距离过近导致的追尾、剐蹭等事故占比显著。传统汽车防撞系统多依赖雷达或摄像头,存在成本高、环境适应性差等问题。超声波传感器因其非接触式测距、成本低、抗干扰能力强......

2025-11
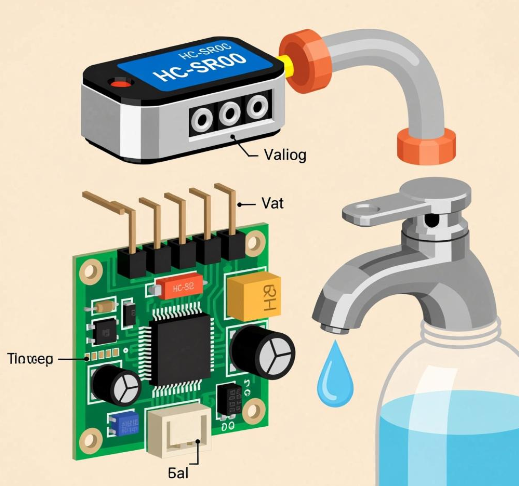
基于AT89S51单片机超声波测距仪器设计方案
基于AT89S51单片机的超声波测距仪器设计方案一、引言随着工业自动化、机器人导航、智能交通等领域的快速发展,非接触式距离测量技术的重要性日益凸显。超声波测距技术凭借其非接触、成本低、抗干扰能力强等优势,成为中短距离测量的主流方案之一。本设计以AT89S51单片机为核心,结合超声波传感器、温度补偿模块和显示电路,构建一套高精度、低成本的超......
方案推荐

基于Xilinx XCKU115的半高PCIe x8 硬件加速卡设计方案

图像传感器在汽车、工业和边缘AI的应用动向

基于RFID技术的智能档案管理系统设计方案

如何确保工业物联网设计符合ISA/IEC安全标准

基于LPC55S69+i.MX 8M的快速灵活EV充电系统解决方案

如何利用物质连接智能家居自动化的孤岛
推荐产品




推荐卖盘
热门标签
更多>>









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


