



 产品分类
产品分类
基于STM32F103ZET6单片机+JGB37-555B电机+STM32F427摄像头模块实现智能工厂搬运系统设计方案
 20
20
 拍明
拍明
原标题:智能工厂搬运系统设计方案
随着中国制造的全球化和市场竞争的激烈化,对产品生产周期和产品质量都提高了较高的要求,这促使很多产品的生产模式由传统的大批量单品种转为小批量多品种生产发展。因此,为了适应时代的发展要求,我国的装备制造业正面临着产业的升级换代,其中,各类机器人(装配机器人、搬运机器人等)在现代制造中起着不可替代的作用。随着计算机控制、人工智能等技术的不断发展,机器人技术的应用已成为衡量一个国家制造业水平和科技发展水平的重要标志。
我国目前的制造业正在朝着智能化、高端化的方向发展,各种机器人已经应用到生产制造的各个场合,比如应用在生产线上的焊接机器人、喷涂机器人、装配机器人,应用在物流存储中的搬运机器人、打包机器人等。各类机器人技术的应用不仅可以有效节省劳动力、提高产品的质量和生产效率,而且保证了认识安全,大大提高了工业生产自动化水平。
针对当前智能制造的企业发展需求,本文提出并设计了一种智能工厂搬运系统,综合运用了嵌入式控制、智能机器人、视觉处理和机电一体化等技术,采用ARM处理器,通过智能机器人循迹和图像识别,实现物料的上料、装配、入库的全自动化过程,充分展现了机器人技术在工业生产领域的应用及发展趋势。
1 系统总体设计
本文设计的智能工厂搬运系统总体设计分为两大部分:装配搬运机器人和外围设备,其中外围设备包括供料站、冲压站和仓库区。装配搬运机器人主要负责物料的转移和搬运,而外围设备负责物料的处理加工和存储。具体细分,可将系统分成装配搬运机器人、供料站、冲压站和仓库区这四部分,如图1所示。
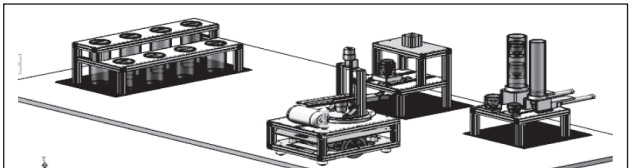
图 1 智能工厂搬运系统模型示意图
(1)装配搬运机器人:装配搬运机器人需要进行抓取物料、识别物料、循迹的功能。因此机器人的机械手爪需可进行上下移动和前后伸缩,前后伸缩选用电机带动链条的方式来实现,上下移动用电机带动丝杠旋转的方式来实现。物料的识别和循迹都采用摄像头实现。
(2)供料站:供料站的主要功能是将物料推出,因此在物料放置处装有传感器检测是否有料,同时物料放置处后方设有双气缸,将料芯和料壳同时推出。
(3)冲压站:专用于加工料芯和料壳,将两者装配。此站也设有两个气缸,一个需要将物料移动至压料的位置,另一个进行压料。
(4)仓库区:专用于存放不同类型的物料。
2 系统硬件设计
智能工厂搬运系统的硬件设计主要包括装配搬运机器人的控制系统设计,系统硬件设计框图如图2所示。
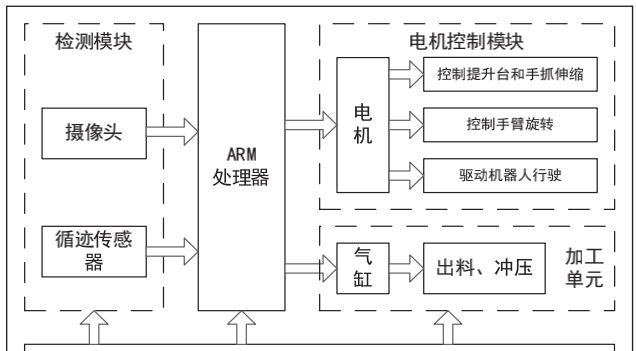
图 2 系统硬件框图
通过系统硬件框图可以看出,智能工厂搬运系统主要由控制器模块、检测模块、电机控制模块、电源模块以及加工单元等部分组成,其中控制器模块采用ARM处理器STM32单片机作为系统控制核心;检测模块由摄像头和循迹传感器组成,完成物料的图像设别及机器人的路线检测;电机控制模块则由三种不同的电机类型组成,分别用于实现搬运机器人的行走、机械臂的旋转与升降;加工单元则由执行器气缸来完成物料的物料和冲压工作;电源模块的作用则是为输入设备、输出设备和控制设备提供电源。
2.1 控制器模块
智能工厂搬运系统的控制器模块采用意法半导体公司推出的基于ARMCortex-M3内核的STM32F103ZET6单片机,该单片机基于Cortex-M内核设计,工作频率为72MHz,内置高速存储器,具有丰富的增强I/O端口和外设,支持多种通信接口,自带AD转换功能,用于接收摄像头和循迹传感器检测到的信息并进行处理。
2.2电机控制模块
电机控制模块是整个智能工厂搬运系统中的动力来源,实现了搬运机器人的行走、物料机械臂控制等动作,分别采用3种类型的直流电机实现,JGB37-555B电机用于提升台和手臂的伸出;GW4058-31ZY涡轮蜗杆电机用于手臂的旋转,MD36直流减速电机用于机器人的车轮。
(1)JGB37-555B电机
该电机的工作电压范围是6-24V,额定12V时转速有640rpm,400rpm,212rpm,133rpm,71rpm,44rpm,30rpm,23rpm,14rpm,8rpm,5rpm,在6V时转速减少一倍,在24V时转速增加一倍,电机为通用型。
(2)涡轮蜗杆电机
该电机额定电压在6-24V,工作电压在6-24V,重量在500g左右,电机最大瞬间允许负载70kg.cm,不允许堵转使用,超出使用扭力或者反复堵转使用,极易造成齿轮损坏。
(3)直流减速电机
该电机型号为MD36P27,额定电压在24V,空载转矩为325±30rpm,额定转速为230±20rpm,额定扭矩为13.5KG.cm,空载电流为0.3A,额定电流为2.3A,堵转电流为7A,额定功率为35W,减速比为1:27,适用于全向移动机器人底盘。
2.3摄像头模块
摄像头安装在智能机器人中的作用是实现物料的检测,选用了OpenMV像头,该摄像头采用的STM32F427拥有丰富的硬件资源,引出UART,I2C,SPI,PWM,ADC,DAC以及GPIO等接口方便扩展外围功能。USB接口用于连接电脑上的集成开发环境OpenMVIDE,协助完成编程、调试和更新固件等工作。
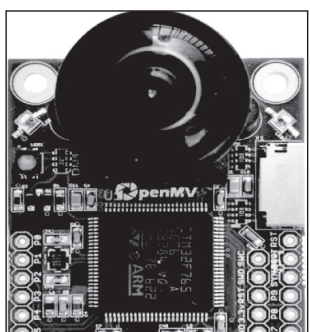
图 3 OpenMV 摄像头
3 系统软件设计
智能工厂搬运系统的软件设计是在硬件系统的基础上通过软件程序的设计,实现物料检测、搬运、冲压、入库等功能。根据系统硬件组成,需要对供料站、冲压站及装配搬运机器人三部分进行设计程序的设计,以此实现各自的功能,其中装配搬运机器人完成物料的识别检测和搬运,而供料站和冲压站则负责物料的加工处理。
整个软件设计针对STM32处理器,采用C语言进行程序编写,其中,装配搬运机器人的主要软件功能设计如下:装配搬运机器人软件程序首先判断供料站动作是否完成,若没有一直等待至动作完成,完成后机器人按照设定路线循迹至供料站位置,控制器驱动机械手摆放物料,并整体搬运至冲压站;等待冲压站工作完成后,机器人抓取料块,摄像头进行图像识别,最后循迹至仓库区,将料块分类入库,回到机器人原始位置,一套装配搬运动作完成。
4 结束语
本文提出一种智能工厂的上下料移动机器人,综合运用了嵌入式控制、智能机器人、视觉处理和机电一体化等技术,使用嵌入式ARM处理器STM32系列,通过智能机器人循迹和图像识别,实现物料上料、装配、入库的全自动化过程,充分展现了机器人前沿技术,反应机器人技术的发展趋势。工业机器人以其高质量的工作、高速的工作效率不断地改变着人类的生产生活方式,特别是近年来,机器人搬卸技术得到了迅猛的发展。其中,上下搬运机器人凭借机械机构、使用范围和灵活性方面的优势,能够同时处理多种物料的搬运。
作者:胡志明,赵帆,杨少祥,王思蒙,董国庆,陈志亮
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


