



 产品分类
产品分类
基于Arduino 设计的“ Miles”开源四足蜘蛛机器人(电路图)
 106
106
 拍明
拍明
原标题:基于Arduino 设计的“ Miles”开源四足蜘蛛机器人(电路图)
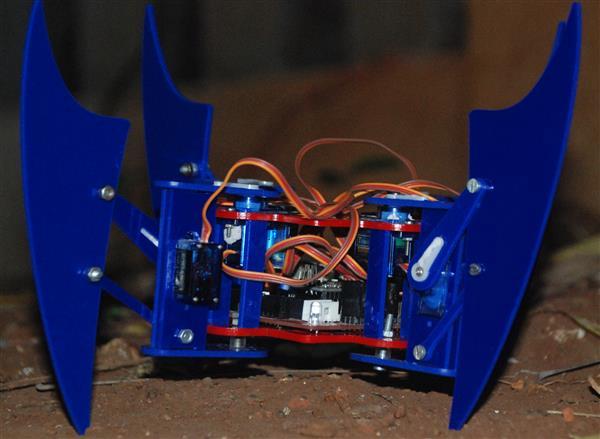
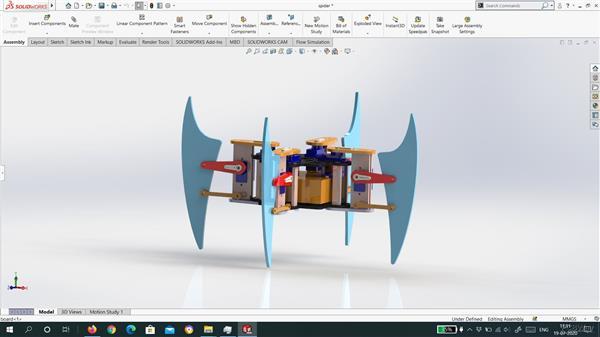
它使用8台 SG90 / MG90伺服电机 作为腿部执行器,由定制的PCB制成,用于为伺服器供电和控制,以及Arduino Nano.PCB具有用于IMU模块,蓝牙模块甚至IR传感器阵列的专用插槽,从而使机器人自主性。机身由激光切割的3mm亚克力板制成 ,也可以3D打印。对于发烧友来说,探索 机器人学中的逆运动学是一个伟大的项目 。
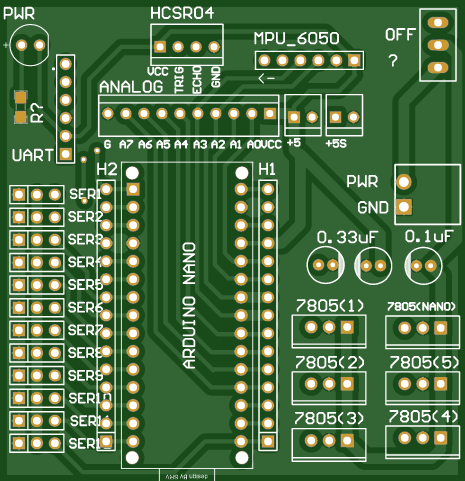
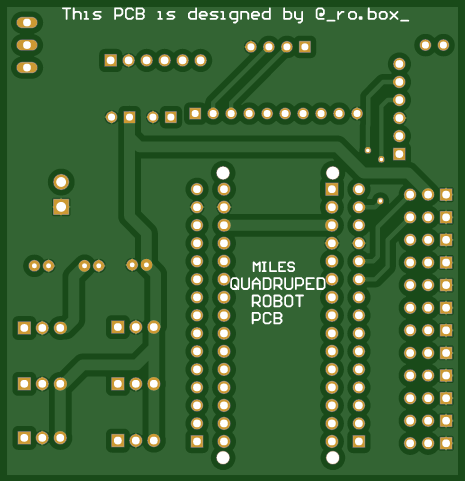
我用Altium软件设计PCB (要下载, 请点击此处)。 如果全部同时工作,则12个SG90 / MG90伺服器最多可消耗 4-5安培的电流,因此该设计需要更高的电流输出能力。我已经使用7805稳压器为伺服器供电,但是它可以输出最大1 Amp的电流。为了解决这个问题, 并联了6个LM7805 IC以增加电流输出。
原理图和Gerber可以在这里找到 。
该设计的特点包括:
MPU6050 / 9250用于角度测量
高达6 A的电流输出
隔离伺服电源
HCsr04超声波传感器输出
还提供了用于蓝牙和I2C的外围设备。
所有模拟引脚均在Relimate上提供,用于传感器和执行器的连接器
12路伺服输出
电源指示LED
PCB规格:
PCB的尺寸为77 x 94毫米
2层FR4
1.6毫米
该设计 为伺服器和Arduino提供了单独的5V。检查 所有单个电源轨与地短路 ,即 Arduino的5V输出,伺服VCC输出和输入12V凤凰。
一旦检查了PCB是否短路,就可以对Arduino进行编程了。 测试代码可以在我的github上找到。
责任编辑:
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
基于MC33771主控芯片的新能源锂电池管理系统解决方案

AMIC110 32位Sitara ARM MCU开发方案

基于AMIC110多协议可编程工业通信处理器的32位Sitara ARM MCU开发方案

基于展讯SC9820超低成本LTE芯片平台的儿童智能手表解决方案

基于TI公司的AM437x双照相机参考设计

基于MTK6580芯片的W2智能手表解决方案









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


