



 产品分类
产品分类
基于51单片机的定位系统设计
 30
30
 拍明芯城
拍明芯城
1、基于51单片机GPS定位系统设计
基于51单片机GPS定位系统设计
GPS(Global Positioning System,全球定位系统),是一个由24颗卫星组成的卫星系统。可以保证在任意时刻,任何地点都同时检测到4颗卫星,以保证卫星可以采集到该观测点的经纬度和高度,从而实现导航、定位、授时等功能。现在在很多领域都有用到GPS技术,比如可以用来引导汽车、飞机、船舶以及个人准确的到达目的地,本文就是以保证个人的安全、准确出行研究的GPS定位系统,设计制作一个单片机系统,单片机系统由电源电路、晶振电路、复位电路、LCD驱动电路等组成,此系统用以读取GPS模块的数据并处理,最后显示在LCD12864上面,用户可以实时通过读取12864显示的内容了解自己的位置以及当前时间,同时由于用到有单片机,以后还可以在上面加很多想要的功能,是一个可扩展、很具有使用价值的系统。
1、 系统方案选择和论证
1.1、引言
GPS 是英文Global Positioning System(全球定位系统)的简称,而其中文简称为“球位系”。GPS起始于1958年美国军方的一个项目,1964年投入使用。是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统 。其主要目的是为陆、海、空三大领域提供实时、 全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的。经过20余年的研究实验,耗资300亿美元,到1994年,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。随着人民生活水平的发展,GPS技术被越来越多的应用在个人PDA、个人车载终端、手机等设备上。人们通过GPS,能准确知道自己所在的位置,从实现到导航、确定旅游路线、获取地理信息等功能。本文介绍的GPS导航系统,以单片机作为主控芯片,配以GPS、12864显示屏,构建了一个GPS信息显示的系统。本系统在一定程度上推动了GPS导航设备研究的发展。

1.2 方案说明
1.2.1、 总体设计方案
个人手持设备要求是功耗要足够低、操作简单、界面美观、方便观看。
为完成相应功能,本设计提出的方案如图1.1所示。系统包括以下几个基本模块:电源模块、主控模块、显示模块、GPS定位模块。GPS模块负责接收卫星信息,单片机模块负责读取GPS模块数据并处理,显示模块主要负责将GPS模块接收到的数据显示出来供用户随时观看。
1.2.2、 系统功能说明
(1).定位功能
GPS通过接收卫星信号,可以准确地定出其所在的位置,位置误差小于10米。利用GPS,在12864上面显示当前位置。
(2).查询时间功能
GPS还可以接收卫星发下来的时间信息,利用单片机控制12864显示出当前时间,用户可以很方便的了解时间。
1.3、 部分模块设计方案
1.3.1、 控制模块设计方案
单片机最小系统由晶振电路、复位电路、电源电路等组成
1.3.2、 显示电路设计方案
本项目选用LCD12864作为显示屏,电路简单,选用并行通信方式
1.3.3、 GPS模块选择方案
方案一:采用串口接口GPS模块。优点:便于驱动,程序简单,价格便宜。缺点:体积较大。
方案二:采用usb接口GPS模块。优点:便于携带。缺点:驱动相对较难、价格相对较贵。
1.4、总体方案确定
1.4.1、系统硬件方案

表1.1系统硬件方案

2、 系统的硬件设计与实现
系统硬件特性如下图:
该系统是用手工做的腐蚀板,成本很低,性能稳定,同时用LCD12864作为显示屏显示位置及时间等信息,显示的容量大数据量小,一个页面可以显示8*4个汉字或16*4个字符。
2.1、 主控芯片电路
主控芯片为AT89S52,该芯片性能稳定、工艺精良。
图2.1为主控芯片电路,AT89S52是一种低功耗、高性能CMOS 8位微控制器,具有8K 在系统可编程Flash 存储器。使用Atmel 公司高密度非易失性存储器技术制造,与工业80C51 产品指令和引脚完全兼容。片上Flash允许程序存储器在系统可编程,亦适于常规编程器。在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得AT89S52在众多嵌入式控制应用系统中得到广泛应用,这里采用AT89S52单片机作为控制芯片,实现了成本低,开发简单等特点。

2.2、 复位电路
图2.2为系统复位电路,为确保系统中电路稳定可靠工作,复位电路是必不可少的一部分,复位电路的第一功能是上电复位。一般单片机电路正常工作需要供电电源为5V±5%,即4.75~5.25V。由于单片机电路是时序数字电路,它需要稳定的时钟信号,因此在电源上电时,只有当VCC超过4.75V低于5.25V以及晶体振荡器稳定工作时,复位信号才被撤除,单片机电路开始正常工作。这种复位电路的工作原理是:VCC上电时,C1充电,在10K电阻上出现电压,使得单片机复位;几个毫秒后,C1充满,10K电阻上电流降为0,电压也为0,使得单片机进入工作状态。工作期间,按下S1,C1放电。S1松手,C1又充电,在10K电阻上出现电压,使得单片机复位。几个毫秒后,单片机进入工作状态
2.3、 晶振电路
图2.3为震荡电路,每个单片机系统里都有晶振,全称叫晶体震荡器,在单片机系统里晶振的作用非常大,它结合单片机内部的电路,产生单片机所必须的时钟频率,单片机的一切指令的执行都是建立在这个基础上的,晶振的提供的时钟频率越高,那单片机的运行速度也就越快,如图,在晶振两边添加两个30pF(27--33pF)电容,使震荡更加稳定。震荡电路接在AT89S52单片机的18、19两个引脚上,给单片机提供震荡信号
2.4、 电源电路
图2.3为电源电路,用的是六脚开关控制电源通断,同时控制了电源的正负极,安全方便,同时有一个电源指示灯,上面加有一个1K的限流电阻。该电路实现了对系统的电源控制,同时显示了电路的状态,方便大家操作。
2.5、 显示电路
图2.4为12864显示电路,该12864的数据口用的AT89S52的P0口,由于P0口内部没有加上拉电阻,需外接10K的上拉电阻,才能保证数据的正常传输。12864的3脚为背光调节的引脚,当3脚的电压不同时背光的亮度就不同,这里设计了一个电路来调节3脚的电压,就是利用一个滑动变阻器一个脚接电源电压,一个脚接地,调节滑动变阻器就可以改变中间那个引脚的电压,我们只需将中间那个引脚和12864的3脚相连接就行了。
2.7 电路图的打印
由于采用的是曝光显影法制作电路板,故打印电路图前,要先对电路图进行打印设置。
由于我们是制作单面板,多余的线路可用跳线连接。打印前,先进行页面设置,具体设置参数如图2.6.1所示,在Mechanical层放置填充方块,覆盖整个电路图。然后进行打印设置:
点击文件,打印设置,然后点击高级选项,在高级选项中选择将要打印的层,本系统中需打印的层如图2.6.2所示:
然后点击左下角的特性设置各层的打印颜色。Bottom Layer 设置为白色,Mechanical层设置为黑色,Multi-Layer设置成白色。设置好后,将打印比例设置为1.0即可进行打印,打印时要注意用硫酸纸或菲林纸,我们是将线布在底层,打印可以选择镜像打印,就是将图2.6.2中Mirror这个选项勾上,到时候正面曝光,也可以将就按照图2.6.2设置,曝光时就背面曝光。
3、 系统的软件设计
3.1、系统概述
本系统的所有程序均采用C语言编写,开发工具为keil,开发环境为windows。应用软件开发的模块化思想来开发这个项目,程序定义了许多子程序来分别管理各个模块,通过对各个子程序的操作,来构建整个程序框架。各个子程序即可单独提取出作为独立的一个有机代码,大大增加了项目的健壮性及可移植性。
3.2、软件详细设
3.2.1 头文件
本系统写了很多头文件,里面包含了很多子模块的信息,各个子模块相互分开,加大了项目的可移植性,如在其它的项目中要使用这些子模块,只需要将C文件和H文件复制过去就行了。包含的头文件如下:
#include
#include
#include
#include "GPS.h"
#include "LCD.h"
#include "display.h"
3.2.2、系统IO定义
整个系统用到了很多独立的IO,在控制12864的读写中要定义几个IO,在控制GPS模块的数据传输中都要用到单片机IO,具体定义IO情况如下:
3.2.3、主函数
主函数,项目入口,用于启动其他模块,并在屏幕上显示主界面窗口,主函数具体如下:
/****************************************
主函数
/****************************************/
void main(void)
{
uchar error_num = 0;
Uart_Init(); //初始化串口
Lcd_Init(); //初始化LCD
GPS_Init(); //初始化GPS
rev_stop=0;
REV_NO;
while(1)
{
if (rev_stop) //如果接收完一行
{
TR0 = 1; //开启定时器
REV_YES;
if (change_page % 2 == 1) //换页
{
if (GPS_GGA_Parse(rev_buf, &GPS)) //解析GPGGA
{
GGA_YES;
GPS_DisplayTwo(); //显示第二页信息
error_num = 0;
gps_flag = 0;
rev_stop = 0;
REV_NO;
}
else
{
error_num++;
if (error_num >= 20) //如果数据无效超过20次
{
GGA_NO;
error_num = 20;
GPS_Init(); //返回初始化
}
gps_flag = 0;
rev_stop = 0;
REV_NO;
}
}
else
{
if (GPS_RMC_Parse(rev_buf, &GPS)) //解析GPRMC
{
RMC_YES;
GPS_DisplayOne(); //显示GPS第一页信息
error_num = 0;
gps_flag = 0;
rev_stop = 0;
led1 = 1;
}
else
{
error_num++;
if (error_num >= 20) //如果数据无效超过20次
{
RMC_NO;
error_num = 20;
GPS_Init(); //返回初始化
}
gps_flag = 0;
rev_stop = 0;
REV_NO;
}
}
}
}
}
由于GPS与单片机通信是选用的串口,在程序中首先初始化了串口,在初始化了LCD12864,然后初始化GPS,做好了准备工作后,就一直等待从GPS接收数据。
3.2.4、延时子函数
在整个系统中都要用到延时函数,这个时间的取定决定这整个系统的工作效率,如果延时时间短了就会造成LCD12864显示不正常,还有就是GPS数据传输不成功;但是延时时间过长又会导致系统的效率低下,所以一个准确的延时函数是很重要的,具体的延时函数如下:
void delay(uint z)
{
uint x, y;
for (x = z; x > 0; x--)
for(y = 110; y > 0; y--);
}
void timer0(void) interrupt 1
{
static uchar count = 0;
TH0 = 0x3c;
TL0 = 0xb0;
count++;
if (count == 200) //2*5秒钟
{
count = 0;
change_page++; //换页
if (change_page == 10)
change_page = 0;
}
}
上面是一个延时1ms(晶振为11.0592M)的函数下面是一个中断函数,用于12864显示用的。
3.2.5、12864子模块
12864的显示函数,先要写地址,然后在写数据,在这个过程前还要检测12864是否忙,就是是否在接收上次的数据,具体的函数如下:
#ifndef __LCD_H_
#define __LCD_H_
#include
#include
#define uchar unsigned char
#define uint unsigned int
#define LCD_data P2 //数据口
sbit LCD_RS = P0^7; //寄存器选择输入
sbit LCD_RW = P0^6; //液晶读/写控制
sbit LCD_EN = P0^5; //液晶使能控制
sbit LCD_PSB = P0^4; //串/并方式控制
#define DelayNOP(); {_nop_();_nop_();_nop_();_nop_();};
void clr_screen();
void delay(uint z);
void Lcd_WriteCmd(uchar cmd);
void Lcd_WriteDat(uchar dat);
void Lcd_Init(void);
void Lcd_SetPos(uchar X,uchar Y);
void Lcd_DispLine(uchar line, uchar pos, uchar *str);
#endif //__LCD_H_
#include "LCD.h"
void delay(uint z)
{
uint x, y;
for (x = z; x > 0; x--)
for(y = 110; y > 0; y--);
}
void clr_screen()
{
Lcd_WriteCmd(0x34); //扩充指令操作
delay(5);
Lcd_WriteCmd(0x30); //基本指令操作
delay(5);
Lcd_WriteCmd(0x01); //清屏
delay(5);
}
static bit Lcd_Busy(void)
{
bit result;
LCD_RS = 0;
LCD_RW = 1;
LCD_EN = 1;
DelayNOP();
result = (bit)(P0&0x80);
LCD_EN = 0;
return(result);
}
void Lcd_WriteCmd(uchar cmd)
{
LCD_RS = 0;
LCD_RW = 0;
LCD_EN = 0;
_nop_();
_nop_();
LCD_data = cmd;
DelayNOP();
LCD_EN = 1;
DelayNOP();
LCD_EN = 0;
}
void Lcd_WriteDat(uchar dat)
{
LCD_RS = 1;
LCD_RW = 0;
LCD_EN = 0;
LCD_data = dat;
DelayNOP();
LCD_EN = 1;
DelayNOP();
LCD_EN = 0;
}
void Lcd_Init(void)
{
LCD_PSB = 1; //并口方式
Lcd_WriteCmd(0x34); //扩充指令操作
delay(5);
Lcd_WriteCmd(0x30); //基本指令操作
delay(5);
Lcd_WriteCmd(0x0C); //显示开,关光标
delay(5);
Lcd_WriteCmd(0x01); //清除LCD的显示内容
delay(5);
}
void Lcd_SetPos(uchar X,uchar Y)
{
uchar pos;
if (X==0)
{X=0x80;}
else if (X==1)
{X=0x90;}
else if (X==2)
{X=0x88;}
else if (X==3)
{X=0x98;}
pos = X+Y ;
Lcd_WriteCmd(pos); //显示地址
}
void Lcd_DispLine(uchar line, uchar pos, uchar *str)
{
int i = 0;
Lcd_SetPos(line, pos);
while (str[i] != '�')
{
Lcd_WriteDat(str[i]);
i++;
}
}
12864每一行的地址为,第一行是0x80,第二行是0x90,第三行是0x88,第四行是0x98。
12864每一行的地址为,第一行是0x80,第二行是0x90,第三行是0x88,第四行是0x98。
3.2.6、GPS子模块
这些函数用来读取GPS接收器传来的数据,并进行分析处理。
void GPS_Init(void)
{
Lcd_DispLine(0, 0, init1);
Lcd_DispLine(1, 0, init2);
Lcd_DispLine(2, 0, init3);
Lcd_DispLine(3, 0, init4);
}
int GPS_RMC_Parse(char *line,GPS_INFO *GPS)
{
uchar ch, status, tmp;
float lati_cent_tmp, lati_second_tmp;
float long_cent_tmp, long_second_tmp;
float speed_tmp;
char *buf = line;
ch = buf[5];
status = buf[GetComma(2, buf)];
if (ch == 'C') //如果第五个字符是C,($GPRMC)
{
if (status == 'A') //如果数据有效,则分析
{
GPS -> NS = buf[GetComma(4, buf)];
GPS -> EW = buf[GetComma(6, buf)];
GPS->latitude = Get_Double_Number(&buf[GetComma(3, buf)]);
GPS->longitude = Get_Double_Number(&buf[GetComma( 5, buf)]);
GPS->latitude_Degree = (int)GPS->latitude / 100; //分离纬度
lati_cent_tmp = (GPS->latitude - GPS->latitude_Degree * 100);
GPS->latitude_Cent = (int)lati_cent_tmp;
lati_second_tmp = (lati_cent_tmp - GPS->latitude_Cent) * 60;
GPS->latitude_Second = (int)lati_second_tmp;
GPS->longitude_Degree = (int)GPS->longitude / 100; //分离经度
long_cent_tmp = (GPS->longitude - GPS->longitude_Degree * 100);
GPS->longitude_Cent = (int)long_cent_tmp;
long_second_tmp = (long_cent_tmp - GPS->longitude_Cent) * 60;
GPS->longitude_Second = (int)long_second_tmp;
speed_tmp = Get_Float_Number(&buf[GetComma(7, buf)]); //速度(单位:海里/时)
GPS->speed = speed_tmp * 1.85; //1海里=1.85公里
GPS->direction = Get_Float_Number(&buf[GetComma(8, buf)]); //角度
GPS->D.hour = (buf[7] - '0') * 10 + (buf[8] - '0'); //时间
GPS->D.minute = (buf[9] - '0') * 10 + (buf[10] - '0');
GPS->D.second = (buf[11] - '0') * 10 + (buf[12] - '0');
tmp = GetComma(9, buf);
GPS->D.day = (buf[tmp + 0] - '0') * 10 + (buf[tmp + 1] - '0'); //日期
GPS->D.month = (buf[tmp + 2] - '0') * 10 + (buf[tmp + 3] - '0');
GPS->D.year = (buf[tmp + 4] - '0') * 10 + (buf[tmp + 5] - '0')+2000;
UTC2BTC(&GPS->D);
return 1;
}
}
return 0;
}
int GPS_GGA_Parse(char *line,GPS_INFO *GPS)
{
uchar ch, status;
char *buf = line;
ch = buf[4];
status = buf[GetComma(2, buf)];
if (ch == 'G') //$GPGGA
{
if (status != ',')
{
GPS->height_sea = Get_Float_Number(&buf[GetComma(9, buf)]);
GPS->height_ground = Get_Float_Number(&buf[GetComma(11, buf)]);
return 1;
}
}
return 0;
}
static float Str_To_Float(char *buf)
{
float rev = 0;
float dat;
int integer = 1;
char *str = buf;
int i;
while(*str != '�')
{
switch(*str)
{
case '0':
dat = 0;
break;
case '1':
dat = 1;
break;
case '2':
dat = 2;
break;
case '3':
dat = 3;
break;
case '4':
dat = 4;
break;
case '5':
dat = 5;
break;
case '6':
dat = 6;
break;
case '7':
dat = 7;
break;
case '8':
dat = 8;
break;
case '9':
dat = 9;
break;
case '.':
dat = '.';
break;
}
if(dat == '.')
{
integer = 0;
i = 1;
str ++;
continue;
}
if( integer == 1 )
{
rev = rev * 10 + dat;
}
else
{
rev = rev + dat / (10 * i);
i = i * 10 ;
}
str ++;
}
return rev;
}
static float Get_Float_Number(char *s)
{
char buf[10];
uchar i;
float rev;
i=GetComma(1, s);
i = i - 1;
strncpy(buf, s, i);
buf[i] = 0;
rev=Str_To_Float(buf);
return rev;
}
static double Str_To_Double(char *buf)
{
double rev = 0;
double dat;
int integer = 1;
char *str = buf;
int i;
while(*str != '�')
{
switch(*str)
{
case '0':
dat = 0;
break;
case '1':
dat = 1;
break;
case '2':
dat = 2;
break;
case '3':
dat = 3;
break;
case '4':
dat = 4;
break;
case '5':
dat = 5;
break;
case '6':
dat = 6;
break;
case '7':
dat = 7;
break;
case '8':
dat = 8;
break;
case '9':
dat = 9;
break;
case '.':
dat = '.';
break;
}
if(dat == '.')
{
integer = 0;
i = 1;
str ++;
continue;
}
if( integer == 1 )
{
rev = rev * 10 + dat;
}
else
{
rev = rev + dat / (10 * i);
i = i * 10 ;
}
str ++;
}
return rev;
}
static double Get_Double_Number(char *s)
{
char buf[10];
uchar i;
double rev;
i=GetComma(1, s);
i = i - 1;
strncpy(buf, s, i);
buf[i] = 0;
rev=Str_To_Double(buf);
return rev;
}
static uchar GetComma(uchar num,char *str)
{
uchar i,j = 0;
int len=strlen(str);
for(i = 0;i < len;i ++)
{
if(str[i] == ',')
j++;
if(j == num)
return i + 1;
}
return 0;
}
static void UTC2BTC(DATE_TIME *GPS)
{
GPS->second ++;
if(GPS->second > 59)
{
GPS->second = 0;
GPS->minute ++;
if(GPS->minute > 59)
{
GPS->minute = 0;
GPS->hour ++;
}
}
GPS->hour = GPS->hour + 8;
if(GPS->hour > 23)
{
GPS->hour -= 24;
GPS->day += 1;
if(GPS->month == 2 ||
GPS->month == 4 ||
GPS->month == 6 ||
GPS->month == 9 ||
GPS->month == 11 )
{
if(GPS->day > 30)
{
GPS->day = 1;
GPS->month++;
}
}
else
{
if(GPS->day > 31)
{
GPS->day = 1;
GPS->month ++;
}
}
if(GPS->year % 4 == 0 )
{
if(GPS->day > 29 && GPS->month == 2)
{
GPS->day = 1;
GPS->month ++;
}
}
else
{
if(GPS->day > 28 &&GPS->month == 2)
{
GPS->day = 1;
GPS->month ++;
}
}
if(GPS->month > 12)
{
GPS->month -= 12;
GPS->year ++;
}
}
}
void Int_To_Str(int x,char *Str)
{
int t;
char *Ptr,Buf[5];
int i = 0;
Ptr = Str;
if(x < 10) // 当整数小于10时,转化为"0x"的格式
{
*Ptr ++ = '0';
*Ptr ++ = x+0x30;
}
else
{
while(x > 0)
{
t = x % 10;
x = x / 10;
Buf[i++] = t+0x30; // 通过计算把数字转化成ASCII码形式
}
i -- ;
for(;i >= 0;i --) // 将得到的字符串倒序
{
*(Ptr++) = Buf[i];
}
}
*Ptr = '�';
4、 系统测试
在做完上述的步骤后,我们可以进行系统测试。
刚开始时都一直搜索不到卫星,后面到处查找资料,终于找到问题所在,原来在室内基本上是搜不到卫星的,后面在室外进行测试,系统可以工作了,能够准确的定位。
具体如图:
(这里你自己照几张12864显示图片就可以了)
5、 总结
通过这次的毕业设计,我在更加灵活、牢固地掌握了所学的相关专业知识的同时。也大量学习了单片机方面的相关知识。至此,GPS定位系统经过最初设计、实现及应用检验,已经具备基本的功能,可初步满足个人移动导航信息系统的需求。当然由于时间和能力的有限,这款产品也有其一定的不足,值得进一步的深入研究,例如:在打开GPS接收模块之后,系统的响应速度将有显著的下降,还有就是显示的是数字,还没有转化为地图。问题可能在硬件平台的处理速度和可调用的资源有限,也有可能在软件接收上的程序结构不合理。GPS接收信号有时会发生信号接收的不稳定,出现信号的偏移,超过标称的误差值。问题可能在开发平台的设计电路中对于数据信号线的排版上,没有使信号线等距,也没有设置合理的信号隔离和保护带,导致最终出现了不应有的误差。但从软件上着手,如何纠正这样的误差也是值得研究的一个方向。在本课题中只实现了从任意点至任意点的导航,导航功能可以从软件方面继续深入的研究,包括以后开发对地图格式的选择等。这些都是将来值得完善之处。
参考文献:
杨颂华 数字电子技术基础.西安电子科技大学出版社 2009.12
曹国华 单片机原理及接口技术 西安电子科技大学出版社 2007.12
肖洪兵 跟我学用单片机. 北京:北京航空航天大学出版社,2002.8
何立民 单片机高级教程. 第1版.北京:北京航空航天大学出版社,2001
赵晓安 MCS-51单片机原理及应用. 天津:天津大学出版社,2001.3
李广第 单片机基础. 第1版.北京:北京航空航天大学出版社,1999
2、基于单片机的GPS定位系统
1、设计需求及目标
系统由电源电路、晶振电路、复位电路、LCD驱动电路等组成,此系统用以读取GPS模块的数据并处理,最后在LCD液晶显示屏上显示经纬度和时间,用户可以实时通过读取显示的内容了解自己的位置以及当前时间,并可以实现时间自动校准,定位精度为15m。
2、设计思路及方案
系统硬件部分电路大致上可以分成稳压电源、单片机小系统及外围电路和LCD显示屏电路三部分。电路为单片机89C52控制的GPS器件,实现定位系统数据的采集和现实。其中所使用的器件主要是3个,单片机89C52、GPS模块GARMIN GPS25以及LCD显示模块MGLS-12032A。在这里仅列出单片机和LCD接口部分电路的器件名称和相关的主要功能。以单片机为核心将GPS数据发送模块,LCD1602显示模块系统的结合在一起形成一个整体,实现特定功能。

3、基于51单片机的GPS全球定位系统
本文是在PXA270嵌入式开发板和GPS模块上开发实现的。在Linux下的嵌入式开发环境中,利用C++设计完成定位。嵌入式系统利用软件设计主要完成GPS定位信号的处理、电子地图的移植、地球坐标的转换、定位的显示等功能。
1 系统概述
嵌入式系统是控制、监视或者辅助装置、机器和设备运行装置;是软件和硬件的综合体,可涵盖机械等附属装置;有着友好的人机界面,支持LCD及GPS模块;主要完成提取GPS定位信号的数据、坐标转换、电子地图的显示等功能。软件设计流程如图1所示。

2 嵌入式系统软件设计
2.1 GPS模块输出的信息的提取
GPS模块通电后,会自动搜索卫星信号,并把计算数据从串口输出。所有GPS接收机以通用的NMEA格式输出数据。NMEA-0183协议定义的语句较多,但常用且兼容性较广的语句只有:$GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG、$GPGLL等。如图2所示。

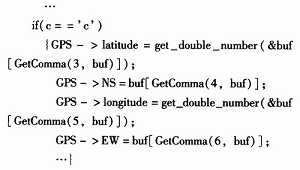
用串口连接宿主机与开发板的串口0。宿主机进入Linux,打开Minicom终端。设置波特率115 200,8位数据,1位停止,无校验,无流控。串口的设备文件为/dev/ttyS*,其中,ttyS0为串口1,ttyS1为串口2,以此类推。在对串口通信之前,首先要对串口参数进行初始化、设置它的属性以保证通信双方的通信参数保持一致。初始化完串口,就可以进行读取操作了。由于GPS发送的数据类型都是以&GPGGA符
号开头,所以检测&GPGGA符号,进而进行下一步的处理。关键代码如下:
2.2 坐标转换
GPS模块输出的地理坐标是WGS-84坐标系。而国内地图一般是以54北京坐标系作高斯-克吕格平面投影。所以必须作一个坐标转换,即将GPS坐标(WGS-84坐标系)转换到电子地图坐标(54北京坐标系)。坐标转换的具体步骤如下:
(1)空间直角坐标转换成国家大地坐标,国家大地坐标转换成地图平面坐标。
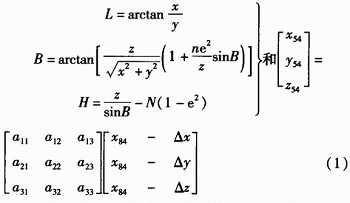
(2)由于x,y的具体推算过程复杂,这里就不全部列举,其结果如下
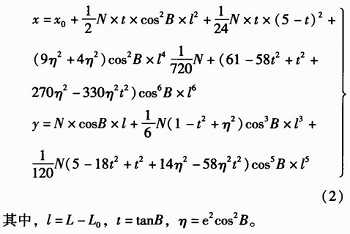
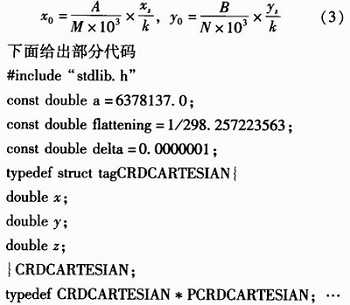
(3)地图平面坐标转换成屏幕坐标。例地图比例尺为1:k,窗口要显示的区域长、宽各为M和N,窗口像素点位A×B点,则定位数据xs,ys在窗口上坐标分别为
2.3 电子地图重构
一般来说,电子地图包含的数据格式都不能直接用在嵌入式平台,所以需要对电子地图的数据进行提取、存储、重构。目前主要使用的是桌面电子地图系统MapInfo,它是美国MapInfo公司的桌面地理信息系统软件,具有数据可视化、信息地图化的桌面解决方案。MapInfo数据格式主要分为tab和mif两种格式。MIF格式是MapInfo公司提供的一种与外界交换数据的机制。它主要用于保存空间对象的几何数据。将电子地图的数据读出后,再在嵌入式平台下,用绘图工具重新组成电子地图即可。部分实现代码如下


03 仿真测试
点测试、线测试、面测试如图3所示。
4 结束语
整个测距定位系统在PXA270嵌入式开发系统下完成,工程系统庞大,整个系统基本功能已实现。由于本系统软硬件平台有较强的升级能力,许多指标与功能可以进一步完善与提高。从GPS定位数据到电子地图数据的转换,需要一系列复杂的算法,这些算法有待进一步改进和简化,以提高系统运行效率和数据准确性。
4、基于单片机的GPS定位系统的设计,在哪可以找到原理图和程序
关键是下面的结构体:
typedef struct _nmeaINFO
{
double lat; //纬度
double lon; //经度 /**< Longitude in NDEG - +/-[degree][min].[sec/60] */
double elv; /**高度< Antenna altitude above/below mean sea level (geoid) in meters */
double speed; /*移动速度*< Speed over the ground in kilometers/hour */
double direction; /**移动方向< Track angle in degrees True */
........
} nmeaINFO;
5、基于单片机的毕业设计题目哪些简单点
基于单片机的毕业设计简单点的题目如下:
一、智能家居控制系统
在单片机、传感器、通讯技术和家电控制等方面进行设计,实现智能家居的自动化管理,如温度控制、照明控制、窗帘控制等功能,实现智能家居系统的智能化、舒适化。
二、智能绿植养护系统
基于单片机、传感器、液晶屏和控制器等硬件设计,将温度、湿度光照等环境参数进行检测和记录,并通过控制器实现水肥自动喂养.光照调控、温湿度自动调节等功能,保证绿植的正常生长。
三、电子词典设计
该项目主要是基于单片机和学习型记忆卡等硬件设备,以及各种词库和语音合成技术,构建一个功能完备、使用简单、体积小巧的电子词典系统,使用户可以快速查阅和记忆单词、词组、成语等语言内容。
四、智能交通信号灯控制系统
结合单片机、通讯技术、图像处理等技术,实现智能交通信号灯控制,减缓城市交通拥堵,提高道路交通效率,保障行车安全。该项目设计难度较高,需要涉及到通讯信号的处理、图像的处理及其特征提取等关键技术的研究。
五、智能医疗诊断系统
基于单片机、传感器、采样电路、信号处理算法、人工智能等硬件及软件技术,构建一个智能医疗诊断系统,能够检测患者的生理指标,并根据患者的身体状况和历史病例,提供医学诊断结果和治疗建议。
六、智能家庭安防系统
该系统可以通过单片机、配合传感器、通讯模块等硬件,实现对家庭室内和室外环境的实时监测,防盗报警、行程化控制、视频监控等多个功能,提高家庭的安全系数。
责任编辑:David
【免责声明】
1、本文内容、数据、图表等来源于网络引用或其他公开资料,版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系拍明芯城(marketing@iczoom.com),本方将及时处理。
2、本文的引用仅供读者交流学习使用,不涉及商业目的。
3、本文内容仅代表作者观点,拍明芯城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
4、如需转载本方拥有版权的文章,请联系拍明芯城(marketing@iczoom.com)注明“转载原因”。未经允许私自转载拍明芯城将保留追究其法律责任的权利。
拍明芯城拥有对此声明的最终解释权。
相关资讯
:
BAT剑指科大讯飞,能否让其重蹈Nuance覆辙?

三星在中国一面撤资,一面增资是为何?

半导体激光治疗仪是骗局吗?

2016全球十大电子元器件分销商排行榜

2016年10大全球电子元器件代理商排行一览表

STM32学习笔记:通用定时器基本定时功能









 2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版权所有 客服热线:400-693-8369 (9:00-18:00)


